





专利证书
-
US11155313B2高载荷防爆美国证书
-
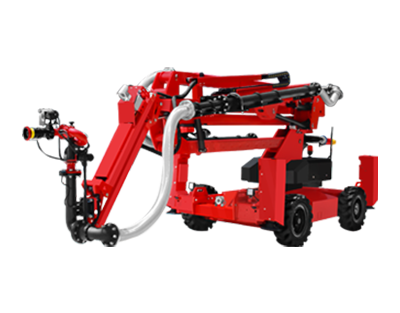
一种井下水仓清理机器人
-
一种梳理式枝条状果实采摘机器人

-
一种全自动树枝修剪机器人及修剪方法

-
一种全自动楼顶查漏补漏机器人及查漏补漏方法

-
一种无人机与消防机器人协同侦察灭火作业方法
-
一种无人加油站用全自主加油服务机器人及加油服务方法

-
一种消防机器人全自动协同侦察和灭火作业方法

-
一种消防侦察灭火机器人及其工作方法

-
一种自适应楼梯楼道清扫机器人机器楼梯爬升方法

-
一种全地形消防机器人及工作方法

-
一种卡爪翻滚式楼梯爬升机器人及其爬升方法

-
一种具备阻尼缓冲特性的悬挂系统及履带式移动平台

-
一种高载荷防爆驱动装置

-
消防机器人协同定位、侦察、火源识别与瞄准灭火方法

-
适用于高速公路的伸缩式全自动清扫机器人及工作方法
-
全自动树裙粉刷机器人及其粉刷方法

-
一种基于高效采摘盘的果实采摘机器人

-
全轮动力和全轮回转驱动轻量化移动底盘系统的工作方法

-
可自动调节的多功能楼梯清理机器人

-
具备方位实时调整功能的消防灭火机器人系统的工作方法

-
复杂环境下消防机器人协同定位与自主作业方法

-
防爆型侦察机器人及工作方法

-
防爆消防侦察灭火机器人及工作方法
-
发明专利-具备方位实时调整功能的消防灭火机器人系统的工作方法

-
发明专利1智能机器人清理、安装和回收小区或市政道路井盖的方法

-
阿图发明专利-一种全地形高度主动升降式全向驱动轮机构的工作方法
-
一种天线自适应姿态调节机构

-
一种适用于高层建筑灭火的机器人

-
矿山灾害预警、侦察和救援机器人集群系统

-
矿山灾害预警、侦查和救援机器人集群系统ZL202020191467X

-
履带式移动底盘(辅助支臂)阿图

-
履带式消杀机器人(一)阿图

-
轮式智能消毒机器人-阿图

US11155313B2高载荷防爆美国证书
一种井下水仓清理机器人
一种梳理式枝条状果实采摘机器人
一种全自动树枝修剪机器人及修剪方法
一种全自动楼顶查漏补漏机器人及查漏补漏方法
一种无人机与消防机器人协同侦察灭火作业方法
一种无人加油站用全自主加油服务机器人及加油服务方法
一种消防机器人全自动协同侦察和灭火作业方法
一种消防侦察灭火机器人及其工作方法
一种自适应楼梯楼道清扫机器人机器楼梯爬升方法
一种全地形消防机器人及工作方法
一种卡爪翻滚式楼梯爬升机器人及其爬升方法
一种具备阻尼缓冲特性的悬挂系统及履带式移动平台
一种高载荷防爆驱动装置
消防机器人协同定位、侦察、火源识别与瞄准灭火方法
适用于高速公路的伸缩式全自动清扫机器人及工作方法
全自动树裙粉刷机器人及其粉刷方法
一种基于高效采摘盘的果实采摘机器人
全轮动力和全轮回转驱动轻量化移动底盘系统的工作方法
可自动调节的多功能楼梯清理机器人
具备方位实时调整功能的消防灭火机器人系统的工作方法
复杂环境下消防机器人协同定位与自主作业方法
防爆型侦察机器人及工作方法
防爆消防侦察灭火机器人及工作方法
发明专利-具备方位实时调整功能的消防灭火机器人系统的工作方法
发明专利1智能机器人清理、安装和回收小区或市政道路井盖的方法
阿图发明专利-一种全地形高度主动升降式全向驱动轮机构的工作方法
一种天线自适应姿态调节机构
一种适用于高层建筑灭火的机器人
矿山灾害预警、侦察和救援机器人集群系统
矿山灾害预警、侦查和救援机器人集群系统ZL202020191467X
履带式移动底盘(辅助支臂)阿图
履带式消杀机器人(一)阿图
轮式智能消毒机器人-阿图