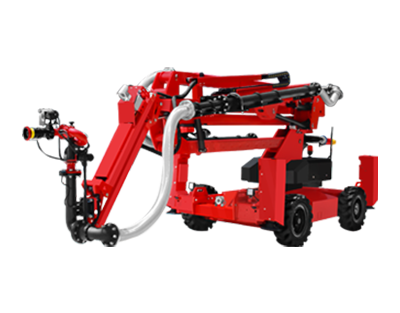
采用双流波箱驱动,动力强劲,保持地面抓地力的同时更加平稳顺畅,搭载高精度机械臂,可实现精密作业。
◆ 悬挂为仿真坦克悬挂系统更稳定,前轮可自调节履带松紧
◆ 可实现载重800g左右40°原地转向
◆ 采用双流驱动波箱,动力强劲,操控性强
◆ 高速运行,动力强劲,爬坡越障,越野性能强
◆ 机器人配备4自由度机械臂,实现任意方向移动