





形状可变履带式机器人
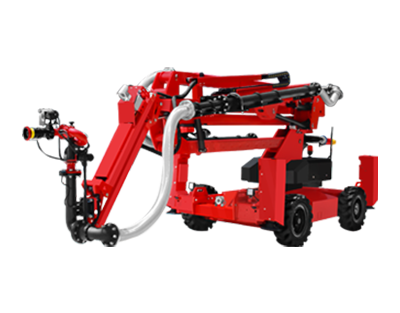
所谓形状可变履带式机器人,是指该机器人所用履带的构形可以根据地形条件和作业要求进行适当变化。有一种形状可变履带式机器人的外形示意图。该机器人的主体部分是两条形状可变的履带,分别由两个主电动机驱动。当两条履带的速度相同时,机器人实现前进或后退移动;当两条履带的速度不同时,机器人实现转向运动。当主臂杆绕履带架上的轴旋转时,带动行星轮转动,从而实现履带的不同构形,以适应不同的运动和作业环境。

履带式机器人可以根据机器人自身的自由度完成攀爬阶梯和跨越沟渠等动作,多用于施工工地。不过为了延长机器人的使用寿命,以及减少在使用中发生故障,工作人员平时要定期对机器人进行养护,这样才不会影响机器人的正常使用。

这种位置的改变既可以是一个自由度的,也可以是两个自由度的。有一种二自由度变位履带机器人,各履带能够绕车体的水平轴线和垂直轴线偏转,从而改变履带式机器人的整体构形。
相关标签
下一篇
新闻分享