






开门、踢足球、后空翻、杂技表演,这年头还有什么是机器人做不到的!
迪士尼的特技替身反正是快要失业了,下一个担心丢饭碗的可能就是蜘蛛侠了。
高校已经相继研发出了爬墙机器人,飞檐走壁无所不能。
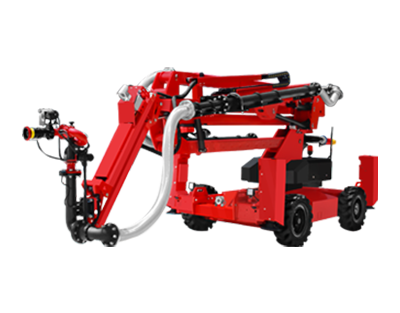
来自UC Berkeley的明星爬墙机器人,RSTAR
2018年Brisbane举行的IEEE机器人与自动化国际会议(ICRA)上,这款名为 “后起之秀”(Rising STAR, or RSTAR)的机器人惊艳全场。它采用了伸直的轮腿灵活性,并增加了另一种自由度,使机器人的身体能够与腿分开移动,通过改变质心帮助它爬过障碍物。
RSTAR是最新的一款,设计用于处理各种地形障碍,同时最小化运输成本。在这个上下文中,“蔓生”指的是机器人的腿,它的角度(可调整地)向下和向身体外延伸。RSTAR有一个附加的自由度,它的身体可以改变相对于腿的位置,改变机器人的质心。
这似乎是一个简单的改变,但它能让一系列新的行为也可以发生了——不仅能让机器人爬过更大的障碍物而不翻身,而且还能垂直爬上间隔很近的墙壁,还能通过调整腿的步态“爬行”穿过狭窄的缝隙。
RSTAR在坚硬的平面上最高速度约为1m/s,尽管它的乌龟步态意味着它可以处理非常柔软或颗粒状的表面(如厚泥或沙子)而不会被粘住。
在其前身STAR的基础上,RSTAR增加了一个带有一个马达的简单机械装置,以来增强这款机器人克服障碍的能力。Zarrouk教授很快就融合了将轮子之间的距离延伸到车身的概念,并最终选择了四杆扩展机构(FBEM)将质心向纵向移动,使机器人更具有可动态重构性。他最终发现,这个有趣的特性也可以用来增加稳定性,或者在需要的时候故意向上倾斜或上下翻转。
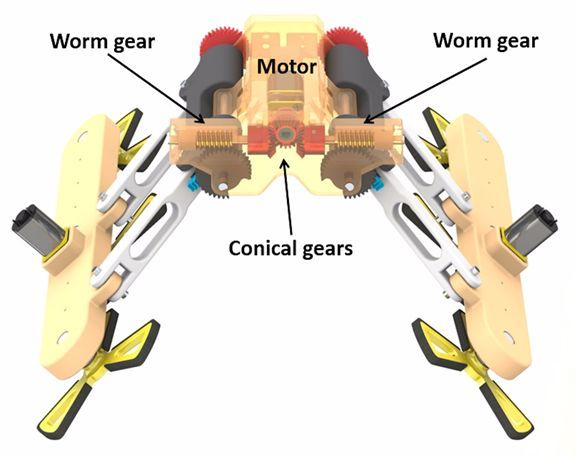
RSTAR的蔓生旋转机构的特点是蜗轮具有高齿轮比和自锁时不被激活。电机的锥形齿轮确保两个蜗杆齿轮以相同的速度旋转,但方向相反。
最初的STAR非常擅长在障碍物下爬行,在崎岖的地形上爬行,并且以非常高的速度爬行。但是,和其他所有的机器人一样,它的攀爬能力受到轮子大小的限制。
它可以攀爬超过其车轮直径70%的障碍物。通过改变它的高度和宽度,RSTAR在跑步上或者在粗糙的地形如砂砾、石头或草中行走效率更高。
RSTAR也可以使用乌龟的步态在颗粒状或高度滑的地形上爬行,而不必转动车轮。RSTAR能爬升的障碍物的高度也更大了,并且大部分取决于其FBEM的杆长。
通过将它的质心移动到前方,RSTAR可以在不翻转的情况下越过陡峭的斜坡。RSTAR还可以垂直爬升到类似管道的环境中,甚至可以在不接触地面的情况下,通过将轮子按在墙上而水平爬行。
STAR系列非常适合执行搜索和救援行动,特别是在倒塌的建筑物或洪水地区等非结构化环境中。在一次真正的搜救行动中,机器人必须克服不同类型的连续障碍物才能到达目标。
这样的机器人应该是简单的,可靠的,并且能够克服多种常见的障碍,而不需要任何外部的机械干预。RSTAR结合了几种攀爬能力和形状的变化,使它可以越过障碍物,或者在缝隙间或缝隙下偷偷溜进。此外,RSTAR速度较快,能耗较低,增加了工作范围和工作时间。

装有轮子的RSTAR能以20cm/s的速度爬上两堵墙之间的空间,机器人的宽度可以根据墙壁的两侧而变化
来自迪士尼的VertiGo
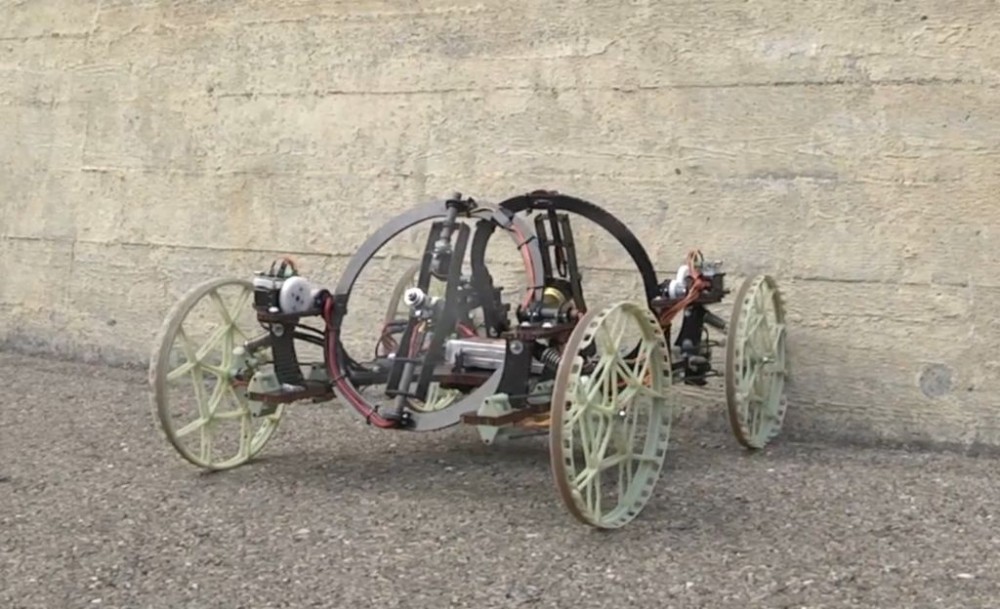
VertiGo是一款能够从地面到墙壁过渡的爬墙机器人,由迪士尼苏黎世研究院和ETH合作开发。该机器人有两个可倾斜的提供推力的螺旋桨和四个轮子。
一对轮子是可操纵的,每个螺旋桨有两个自由度来调节推力的方向。通过从地面到墙壁再回到地面,VertiGo扩展了机器人穿越城市和室内环境的能力。机器人能够快速地在墙上移动,并具有敏捷性。
使用螺旋桨在墙壁上提供推力可以确保机器人能够穿过像砖石结构这样的凹痕。选择两个螺旋桨而不是一个,可以实现从地板到墙壁的过渡——使用后螺旋桨将推力应用到墙壁上,使用前螺旋桨施加向上的推力,从而实现翻转到墙壁上的目的。
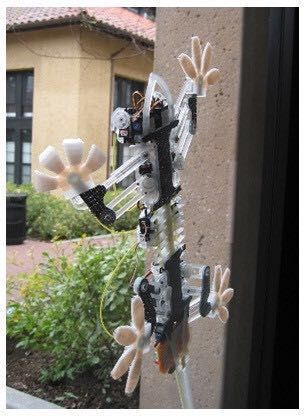
来自Stanford的Stickybot系列及改进版SCAMP
从壁虎身上得到了灵感,壁虎的脚底覆盖着数十亿的纤维,具有200纳米宽的脚套。壁虎可以附着在任何表面上,因为分子间有一种叫做范德华力的弱引力,作用于纤维尖端和壁虎爬行的表面之间。粘附是有方向性的:只有当脚趾向下拖动时,纤维才会粘附,而且会朝相反的方向释放。
为了模拟壁虎的干式粘合,研究人员发明了一种聚合物贴片,上面覆盖着大约30微米宽的柄。柄呈斜角,顶端倾斜,具有方向性粘性。膜片安装在一个机器人的脚趾垫上,Cutkosky和Kim赋予该机器人一个壁虎的步态、卷曲的脚趾和其他细节。
斯坦福大学的研究人员已经获得了一种生物感应装置的专利,这种装置可以利用各向异性摩擦材料来测量光滑的垂直表面。该设备的灵感来自壁虎和其他攀缘蜥蜴,采用类似的顺应性和力控制策略来攀爬(或挂在)光滑的垂直表面,包括玻璃、瓷砖和塑料面板。
Stickybot的攀爬能力是毋庸置疑的,但是它不能飞行,因此,该实验室继续研究了一款新型的集攀爬和飞行于一体的机器人SCAMP。
SCAMP是一种有腿的四旋翼,可以在墙壁上栖息,然后用细小的脚爬上它们。
SCAMP是第一个将飞行、栖息与被动依附技术和攀爬结合在一起的机器人。它也可以从攀爬失败中恢复,也可以在准备再次飞行时起飞。所有这些都是在户外进行的,只使用搭载的感应装置和计算能力,利用以前所有的攀爬机器人的经验以及从大自然中吸取的教训。
SCAMP的腿部设计让人联想到许多攀缘昆虫,从长腿叔叔到螳螂,这绝非偶然。动物需要长而有效的步伐,但受四肢重量的限制。当我们进入昆虫的世界时,异速标度法则意味着长、瘦、几乎失重的腿成为首选的解决方案。
SCAMP并不是昆虫大小的,但是也足够小到像碳纤维和光谱这样的现代工程材料能提供的大小,让我们可以制造出像爬虫一样长、重量高效的腿。
来自CMU的WAALBOT

Waalbot由两套三足轮组成,它们使用旋转执行机构进行单自由度运动,包括被动关节和弹性屈曲。Waalbot不像其他机器人那样使用真空吸力或磁力吸引,而是使用干式粘合,以粘在墙壁和天花板上。
采用PIC单片机控制机器人的运动,它具有车载电源。此外,一个弹簧负载的尾巴确保机器人总是会推到表面。
Waalbot有能力克服小的障碍,这主要得益于它的腿的运动。
纵观各种爬墙机器人,原理以及机械结构各异。有的利用仿生学,学习壁虎爬墙的原理,有的利用力学设计机械结构,通过增加螺旋桨或者轮子实现飞行和攀爬。然而不抛开这些,它们都是实现了同一个愿景,并且希望能将这些机器人应用于搜索和救灾中。