





MIT第三代猎豹机器人
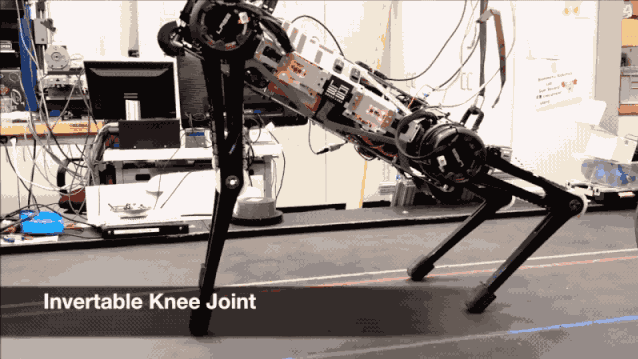
麻省理工大学研发的第三代猎豹机器人(Cheetah 3)现在可以实现跳跃、在崎岖的地形驰骋或爬上堆满杂物的楼梯,并在遇到突然的猛拉、推搡时能迅速恢复其平衡。令人惊讶的是,它实现这些动作靠的不是视觉系统,它可以说是一个盲人机器豹。

这只大小相似成年拉布拉多犬的90磅重的机械野兽,是故意被设计成不依赖相机或任何外部环境传感器而完成这些动作的。取而代之的是,它通过敏捷地“感觉”周围环境的方式来行动,工程师们称之为“盲目运动”,就像穿过一个漆黑的房间一样。
机器人在不过度依赖视觉的情况下,应该有很多意想不到的行为。视觉可能是繁杂的,有些不准确的,有时甚至是不可用的,如果过于依赖视觉,机器人对于位置的判断必须非常准确,这最终将导致它的行为必是缓慢的。所以机器人应当更多地依靠触觉信息。这样,它可以在快速移动时处理意想不到的障碍。
Cheetah 3可以不靠视觉地爬上楼梯以及通过非结构化地形,并能在面对巨大力量的时候迅速恢复其平衡,这都得益于研发团队开发的两个新算法:接触检测算法和模型预测控制算法。接触检测算法有助于机器人确定它的腿从空中摆动到踏到地上的最佳时间。模型预测控制算法会预测一旦给定一个行为步骤,它应该施加多少力。
机器人在不过度依赖视觉的情况下,应该有很多意想不到的行为。视觉可能是繁杂的,有些不准确的,有时甚至是不可用的,如果过于依赖视觉,机器人对于位置的判断必须非常准确,这最终将导致它的行为必是缓慢的。所以机器人应当更多地依靠触觉信息。这样,它可以在快速移动时处理意想不到的障碍。
Cheetah 3可以不靠视觉地爬上楼梯以及通过非结构化地形,并能在面对巨大力量的时候迅速恢复其平衡,这都得益于研发团队开发的两个新算法:接触检测算法和模型预测控制算法。接触检测算法有助于机器人确定它的腿从空中摆动到踏到地上的最佳时间。模型预测控制算法会预测一旦给定一个行为步骤,它应该施加多少力。
同时,研究小组向机器人添加了摄像头,使机器人能够对周围环境进行视觉反馈。该小组正在努力进一步改善机器人的盲动。
基于此,第三代猎豹机器人应用场景十分丰富。如电厂检查,这涉及到各种地形条件,包括楼梯、路障和地面上的障碍物;在地震救援、洞穴探险等方面,猎豹机器人也都可以做到。有无数的场合可以让机器人代替人类来完成简单的任务,一些肮脏、困难、危险的工作,机器人也可以很好地应对。
基于此,第三代猎豹机器人应用场景十分丰富。如电厂检查,这涉及到各种地形条件,包括楼梯、路障和地面上的障碍物;在地震救援、洞穴探险等方面,猎豹机器人也都可以做到。有无数的场合可以让机器人代替人类来完成简单的任务,一些肮脏、困难、危险的工作,机器人也可以很好地应对。
相关标签
上一篇
下一篇
新闻分享