





国际空间站新客人--新一代自由飞翔太空机器人
美国宇航局的Astrobee是新一代自由飞翔太空机器人,专门为国际空间站的宇航员提供各项帮助。
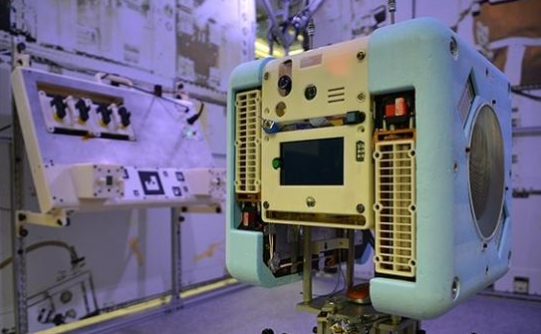
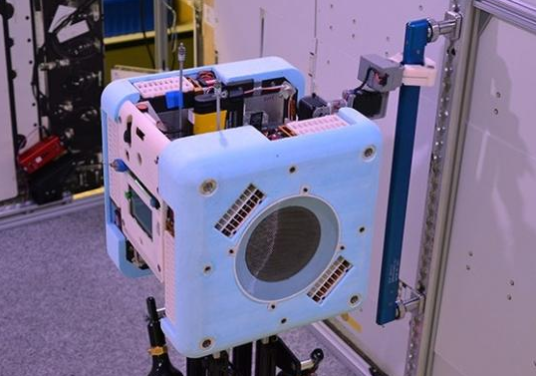
Astrobee是一个边长为32厘米的立方体。每个角和大部分边上都覆盖了一层柔性保险杠材料,从中嵌入了推进系统。机器人的中心部分包含丰富的传感器、控制系统、触控屏幕,以及为后续增加硬件而预留的有效载荷托架,其中包括一个手臂用于抓取国际空间站的扶手。尽管这款机器人在设计上就是为了在国际空间站上自由的飞行,不过在地面进行测试的时候,Astrobee被安装在一个雪橇的顶部,使用二氧化碳喷气推进器创造低摩擦的空气,从而让机器人在非常平滑(同时非常巨大)的花岗岩石块上移动。这允许科研人员测试机器的推进和导航系统,不过一旦将其运输到太空,整个立方体就完全依赖蓝色保护套进行保护,没有在测试过程中的其他保护配件。
Astrobee是一个全新平台,确保它能够在国际空间站完全自主地和安全地运作。其中最大的改善就是推进系统。Astrobee完全使用电动推进系统,通过扩展坞能够自行充电。
Astrobee在国际空间站上运行可以通过地面进行远程遥控,同样也可以让它完全自主操作。通过可以兼容各种定制硬件的模块化托架,这款机器人能够执行各种任务的,在某些情况下甚至能够从人类宇航员手中接过繁琐又无聊的“家务”作业。

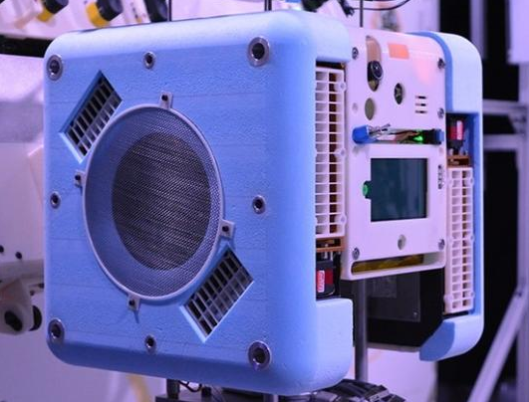
在Astrobee的两个侧面,位于保护屏罩后面的是叶轮——能够吸入空气的大风扇。两个叶轮的相互作用能最小化陀螺力,在机器人的内部不断形成空气加压袋,通过每个面的喷嘴进行引导输出。如果所有喷嘴都处于关闭状态,那么Astrobee就会停止移动;也可以单独或者组合打开形成推力,从而让机器人朝着反方向移动。
在Astrobee的每个面装备推进模块的同时,也为自主操作预留了所有传感器和计算硬件的空间,而且还有足够的托架来容纳各种有效载荷(两个位于正面,两个位于背面),每个托架都含有机械、数据和电源连接。正面顶部的有效载荷托架已经安装了Astrobee自己的导航传感器。

所有Astrobee的自主导航是可选的,而且一个重要功能是从地面远程进行遥控,在必要的时候允许地面的控制器来直接控制机器人,从而在Astrobee的自主驾驶系统出现错误的时候地面的工作人员能够及时接管。
这种可调节的自主驾驶让机器人变得更加高效和灵活,而且控制器能够在任何级别发出指令,确保人类始终拥有最高的控制权限。哪怕在运行过程中出现任何问题,工作人员都能接手并掌控机器人。
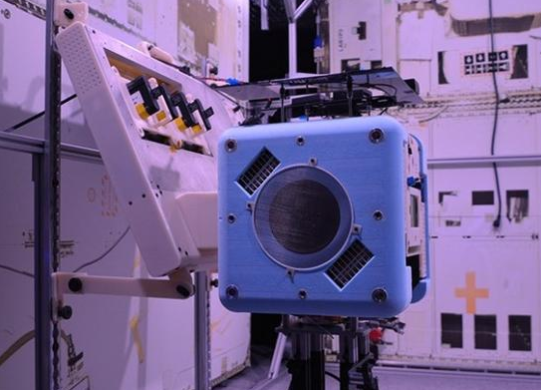
在Astrobee不需要活动访问某个地点的时候,它需要确保自己在国际空间站中不被飘走。为了能够做到这点,来自美国宇航局的工程师设计了一个可爱的小型3D打印栖息臂,在默认情况下折叠缩回Astrobee背面顶部的有效荷载托架,有必要的时候就会伸展出来。
使用后置摄像头,这个机械臂能够定位和抓取标准化扶手,同时也用来帮助宇航员在国际空间站穿梭和保持原地。通过栖息手臂能够确保Astrobee处于静止状态,且不再需要运行叶轮,机器人的续航时间最高可以延长80%。一旦处于栖息状态,手臂的电机就可以用于平移和倾斜额机器人的身体,而这正是远程遥控视频相机所需要的。
Astrobee的外部将会由诺梅克斯纤维材料制作成一个彩色可绘画的“皮肤” ,这些设计可以自行设计,也可以进行外包。除了看起来酷炫之外,另一个原因是在该立方体在可以朝任意方向移动的空间内能够更轻松的识别将会设备的正面和背面。对于宇航员来说,知道哪个是Astrobee的正面是非常重要的。

Astrobee由于采用自主操作设计而认为是有前途的,如果自主级别能够达到实用的级别,那么太空机器人将会迸发无穷的潜力。
Astrobee是一个边长为32厘米的立方体。每个角和大部分边上都覆盖了一层柔性保险杠材料,从中嵌入了推进系统。机器人的中心部分包含丰富的传感器、控制系统、触控屏幕,以及为后续增加硬件而预留的有效载荷托架,其中包括一个手臂用于抓取国际空间站的扶手。尽管这款机器人在设计上就是为了在国际空间站上自由的飞行,不过在地面进行测试的时候,Astrobee被安装在一个雪橇的顶部,使用二氧化碳喷气推进器创造低摩擦的空气,从而让机器人在非常平滑(同时非常巨大)的花岗岩石块上移动。这允许科研人员测试机器的推进和导航系统,不过一旦将其运输到太空,整个立方体就完全依赖蓝色保护套进行保护,没有在测试过程中的其他保护配件。
Astrobee是一个全新平台,确保它能够在国际空间站完全自主地和安全地运作。其中最大的改善就是推进系统。Astrobee完全使用电动推进系统,通过扩展坞能够自行充电。
Astrobee在国际空间站上运行可以通过地面进行远程遥控,同样也可以让它完全自主操作。通过可以兼容各种定制硬件的模块化托架,这款机器人能够执行各种任务的,在某些情况下甚至能够从人类宇航员手中接过繁琐又无聊的“家务”作业。
在Astrobee的两个侧面,位于保护屏罩后面的是叶轮——能够吸入空气的大风扇。两个叶轮的相互作用能最小化陀螺力,在机器人的内部不断形成空气加压袋,通过每个面的喷嘴进行引导输出。如果所有喷嘴都处于关闭状态,那么Astrobee就会停止移动;也可以单独或者组合打开形成推力,从而让机器人朝着反方向移动。
在Astrobee的每个面装备推进模块的同时,也为自主操作预留了所有传感器和计算硬件的空间,而且还有足够的托架来容纳各种有效载荷(两个位于正面,两个位于背面),每个托架都含有机械、数据和电源连接。正面顶部的有效载荷托架已经安装了Astrobee自己的导航传感器。
所有Astrobee的自主导航是可选的,而且一个重要功能是从地面远程进行遥控,在必要的时候允许地面的控制器来直接控制机器人,从而在Astrobee的自主驾驶系统出现错误的时候地面的工作人员能够及时接管。
这种可调节的自主驾驶让机器人变得更加高效和灵活,而且控制器能够在任何级别发出指令,确保人类始终拥有最高的控制权限。哪怕在运行过程中出现任何问题,工作人员都能接手并掌控机器人。
在Astrobee不需要活动访问某个地点的时候,它需要确保自己在国际空间站中不被飘走。为了能够做到这点,来自美国宇航局的工程师设计了一个可爱的小型3D打印栖息臂,在默认情况下折叠缩回Astrobee背面顶部的有效荷载托架,有必要的时候就会伸展出来。
使用后置摄像头,这个机械臂能够定位和抓取标准化扶手,同时也用来帮助宇航员在国际空间站穿梭和保持原地。通过栖息手臂能够确保Astrobee处于静止状态,且不再需要运行叶轮,机器人的续航时间最高可以延长80%。一旦处于栖息状态,手臂的电机就可以用于平移和倾斜额机器人的身体,而这正是远程遥控视频相机所需要的。
Astrobee的外部将会由诺梅克斯纤维材料制作成一个彩色可绘画的“皮肤” ,这些设计可以自行设计,也可以进行外包。除了看起来酷炫之外,另一个原因是在该立方体在可以朝任意方向移动的空间内能够更轻松的识别将会设备的正面和背面。对于宇航员来说,知道哪个是Astrobee的正面是非常重要的。
Astrobee由于采用自主操作设计而认为是有前途的,如果自主级别能够达到实用的级别,那么太空机器人将会迸发无穷的潜力。
相关标签
上一篇
下一篇
新闻分享