





地震救援机器人大盘点
由于地震发生后导致的建筑坍塌,救援人员不仅很难在废墟中寻找受困群众,甚至救援过程中自身也要面对危险。虽然可以通过挖掘机之类的大型器械对坍塌的废墟进行挖掘搜索,但是在一些狭小缝隙的空间里则失去了作用。这时,我们就需要借助一些特别的救援机器人来进行搜救。
一、蛇形机器人

蛇形机器人,是一种能够模仿生物蛇运动的新型仿生机器人。由于它能像生物一样实现“无肢运动”,因而被国际机器人业界称为“最富有现实感的机器人”。在地震救援中,蛇形机器人起到的作用更多的是搜索而非直接营救。由于其独特的构造以及灵活性,蛇形机器人能够更好地进入狭小的空间,通过自身携带的“摄像机”给搜救人员传输救援信息。虽然蛇形机器人仍处在研究发展阶段,但其已拥有广泛的应用前景,除了灾后救援之外,还可以应用到科学探险和状况检查、防恐防爆、医疗、航天航空、危险环境作业、军事、作为操作手等领域。
二、超性价比机器蟑螂
昆虫世界一直是机器人技术工程师的一个重要灵感源泉,一些工程师甚至让昆虫实现半机械化。国外研制成功了一款仿昆虫机器人“达什”(Dash)。“达什”的设计灵感来源于蟑螂,看起来简单但却拥有令人不可思议的敏捷性和速度,每秒最多可移动1.5米。此外,“达什”装有来低分辨率照相机和一个Wi-Fi芯片。更令人感到吃惊的是,“达什”的身体异常坚固。如此强大的机器人,每个的造价还不到1美元。因为它的内部构造由废弃的手机和其他电子设备零部件制成,采用硬纸板制成其外表。相信在灾后救援上,这款机器人必然能大展拳脚。
三、废墟洞穴可变形搜救机器人

废墟搜救可变形机器人,可进入坍塌建筑内部,利用自身携带的红外摄像机、声音传感器将废墟内部的图像、语音信息实时传回后方控制台,供救援人员快速确定幸存者的位置及周围环境。同时,还能为实施救援提供救援通道的信息。
四、小飞机机器人

小飞机机器人是一款可以在天上飞的机器人。这款机器人学名为旋翼飞行机器人,其翼展3米左右,机身长3米左右。最快飞行速度可达70公里/小时左右,在进行超低空飞行时,最低离地面高度仅为10米,可根据山势等地形变化调整飞行高度和速度,使用93号汽油即可。它可进行大范围宏观灾情信息调查,比如可将方圆几十公里内的灾情信息在第一时间反馈给救援部门,为决策者进行支持。
五、探测呼吸和体温的机器人

采用Kinect主传感器的这款机器人在图像感知方面几乎无所不能,之所以不采用激光雷达的原因在于其不仅造价昂贵,而且效率不高,只能显示二维平面图像。相比之下,Kinect的测距仪能够传输3D地图,这对营救人员搜寻被困人员意义重大。
六、履带式救援机器人

这款履带式救援机器人的职责是将人送到安全地带,其内部装有一系列传感器,可在运送途中对伤者的血液流动情况以及其他重要生命体征进行监视。借助于标准的红外摄像机,这款机器人也能够执行搜索任务,但它的主要用途还是充当安全性更高的远程遥控担架。
七、轮滑式救援机器人
这款让人感兴趣的救援机器人,能够分析地形来选择最佳前进方式。在崎岖路面毫无疑问用“腿”比用轮子更合适,但是在平坦路面,轮子是当之无愧的选择。这种可“变形”的机械腿,能够在需要的时候变成轮子,在速度、耗能或者稳定性方面都更具优势。
一、蛇形机器人
蛇形机器人,是一种能够模仿生物蛇运动的新型仿生机器人。由于它能像生物一样实现“无肢运动”,因而被国际机器人业界称为“最富有现实感的机器人”。在地震救援中,蛇形机器人起到的作用更多的是搜索而非直接营救。由于其独特的构造以及灵活性,蛇形机器人能够更好地进入狭小的空间,通过自身携带的“摄像机”给搜救人员传输救援信息。虽然蛇形机器人仍处在研究发展阶段,但其已拥有广泛的应用前景,除了灾后救援之外,还可以应用到科学探险和状况检查、防恐防爆、医疗、航天航空、危险环境作业、军事、作为操作手等领域。
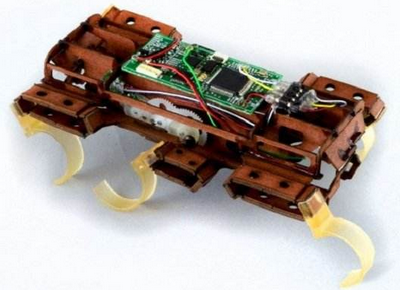
二、超性价比机器蟑螂
昆虫世界一直是机器人技术工程师的一个重要灵感源泉,一些工程师甚至让昆虫实现半机械化。国外研制成功了一款仿昆虫机器人“达什”(Dash)。“达什”的设计灵感来源于蟑螂,看起来简单但却拥有令人不可思议的敏捷性和速度,每秒最多可移动1.5米。此外,“达什”装有来低分辨率照相机和一个Wi-Fi芯片。更令人感到吃惊的是,“达什”的身体异常坚固。如此强大的机器人,每个的造价还不到1美元。因为它的内部构造由废弃的手机和其他电子设备零部件制成,采用硬纸板制成其外表。相信在灾后救援上,这款机器人必然能大展拳脚。
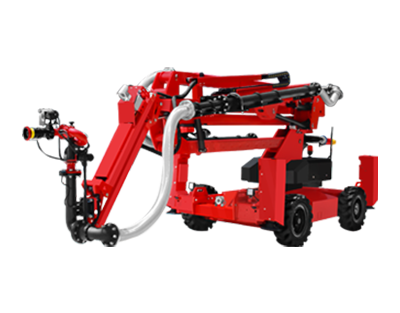
三、废墟洞穴可变形搜救机器人
废墟搜救可变形机器人,可进入坍塌建筑内部,利用自身携带的红外摄像机、声音传感器将废墟内部的图像、语音信息实时传回后方控制台,供救援人员快速确定幸存者的位置及周围环境。同时,还能为实施救援提供救援通道的信息。
四、小飞机机器人
小飞机机器人是一款可以在天上飞的机器人。这款机器人学名为旋翼飞行机器人,其翼展3米左右,机身长3米左右。最快飞行速度可达70公里/小时左右,在进行超低空飞行时,最低离地面高度仅为10米,可根据山势等地形变化调整飞行高度和速度,使用93号汽油即可。它可进行大范围宏观灾情信息调查,比如可将方圆几十公里内的灾情信息在第一时间反馈给救援部门,为决策者进行支持。
五、探测呼吸和体温的机器人
采用Kinect主传感器的这款机器人在图像感知方面几乎无所不能,之所以不采用激光雷达的原因在于其不仅造价昂贵,而且效率不高,只能显示二维平面图像。相比之下,Kinect的测距仪能够传输3D地图,这对营救人员搜寻被困人员意义重大。
六、履带式救援机器人
这款履带式救援机器人的职责是将人送到安全地带,其内部装有一系列传感器,可在运送途中对伤者的血液流动情况以及其他重要生命体征进行监视。借助于标准的红外摄像机,这款机器人也能够执行搜索任务,但它的主要用途还是充当安全性更高的远程遥控担架。
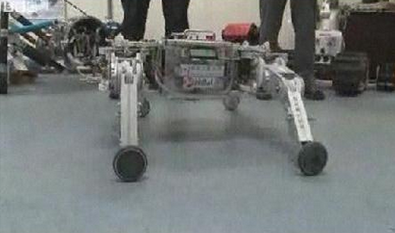
七、轮滑式救援机器人
这款让人感兴趣的救援机器人,能够分析地形来选择最佳前进方式。在崎岖路面毫无疑问用“腿”比用轮子更合适,但是在平坦路面,轮子是当之无愧的选择。这种可“变形”的机械腿,能够在需要的时候变成轮子,在速度、耗能或者稳定性方面都更具优势。
相关标签
上一篇
下一篇
新闻分享